
Figure 8.
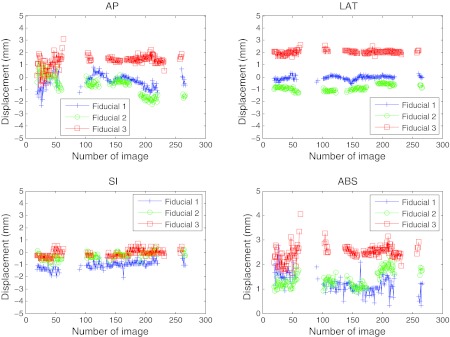
Localization of the three implanted fiducial markers on a set of cine MV images for patient 2. This data corresponds to a fraction on a patient where good positioning during most part of the treatment was achieved (the fiducials were at a position closer than 3 mm from its planned position in most of the treatment). The corresponding 2D detections are presented in Fig. 6. The 3D estimation was robust (especially for the LAT and SI directions). For the AP projection, the estimation was less robust at the starting gantry angles (180° and above), since the direction of estimation was parallel to the gantry angle and some more projections were necessary to get the noise smaller than 1 mm. Tracking with at least one fiducial was achieved in 64% of the images. The relative movement of the three fiducials was quite correlated.