
Figure 1.
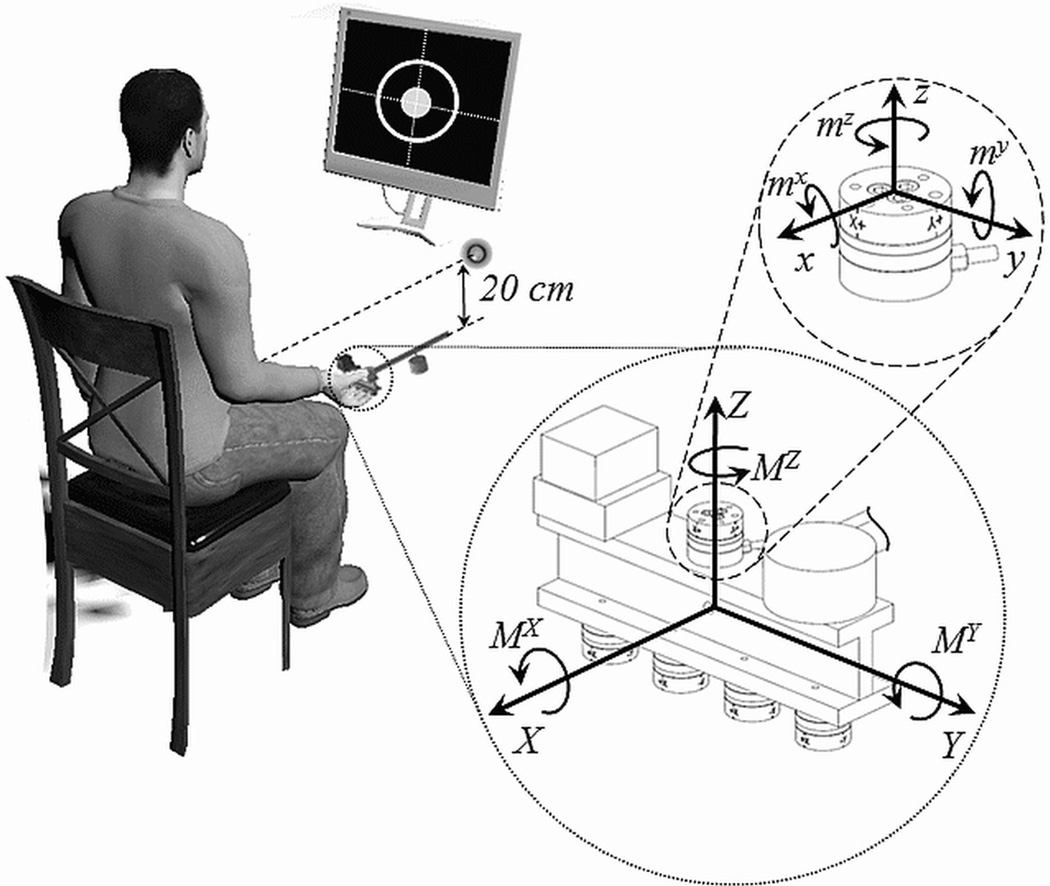
The experiment setup. MX, MY, and MZ are the moments of force with respect to the global coordinate system with X-, Y-, and Z-axes; mx, my, and mz are the local moments with respect to the local x-, y-, and z-axes of each sensor. The initial position of the subject’s forearm was 20 cm lower than the elbow joint. The target was at the height of the elbow joint. The handle orientation feedback on the screen helped the subject to maintain horizontal orientation of the handle.