
Fig. 6.
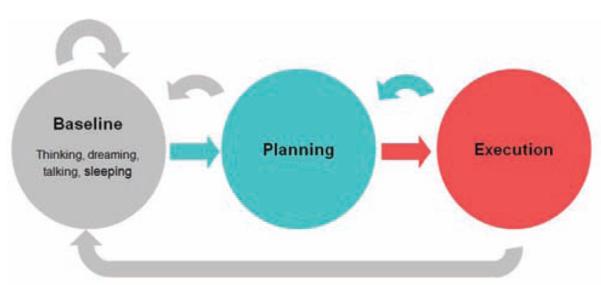
Illustration of brain states involved in autonomous reaching. We spend most of our time in the idle, or baseline state (gray). From here, we switch to a different state where we plan a movement (blue). The movement can then be executed which is another brain state (red). Once completed we can then plan another move (blue arrow) or return to the idling state (long gray arrow). One can also start planning and then abort the move as indicated by the gray short return arrow. Automating a prosthetic involves determining the unique neural characteristics of these states to determine when these transitions occur. Our early computational results suggest that this can be done. See the studies by Achtman et al., 2007, and Kemere et al., 2008.