
Figure 1.
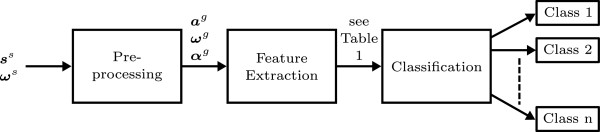
The three steps used for identifying the inertial sensors. Inputs are the measured 3D acceleration (ss) and angular velocity (ωs), both expressed in sensor coordinate frame. Outputs of the identification process are the classes, in this case the body segments to which the inertial sensors are attached.