
Fig. A1.
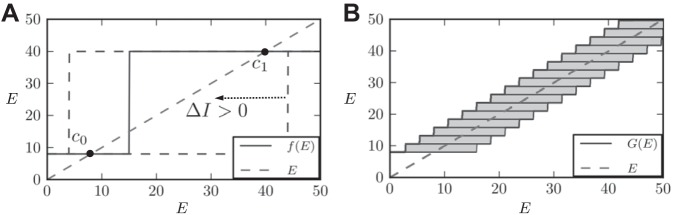
Simultaneous plots of the identity line and the feedback line, G(Ê), for 2 circuits with differing numbers of subunits. A: here N = 1, and so the feedback line G(Ê) = f(Ê) is exactly determined as a function of Ê = r1 (see Eq. 25). The 2 intersections c0 and c1 are stable fixed points. In this way, the subunit firing rate is bistable, and the value attained will depend on the history of the circuit activity. As ΔI is changed, this translates f(Ê); eventually eliminating either c0 or c1 and forcing the subunit to the remaining stable fixed point (here, c0 corresponds to Ê = 8 Hz. and c1 to 40 Hz). In dashed curves, the feedback line is plotted for 2 such values of ΔI. B: now N > 1 and so the feedback line G(Ê) is no longer unambiguously specified as a function of its argument. The function is instead the sum of N potentially bivalued functions, whose actual values will depend on the stimulus history. We represent this fact by plotting the feedback line as a set of stacked boxes, representing the potential contribution of the ith subunit to the total integrator dynamics (Goldman et al. 2003).