
Figure 2.
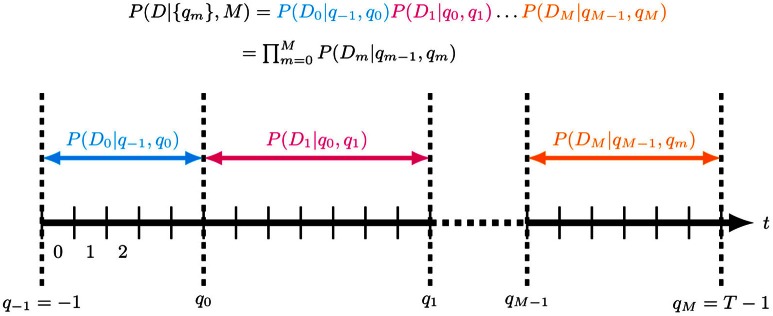
Segmentation of a time series of length T into M+ 1 contiguous, non-overlapping segments with (inclusive) upper segment boundaries qm ∈ {qm}. The observation model in each segment m is given by P(Dm|qm − 1, qm), where Dm is that part of the data which is in segment m. Importantly, the model assumes that the data are independent across segments given the {qm} and M.