
Figure 7. Regular locomotion pattern and interaction with the environment.
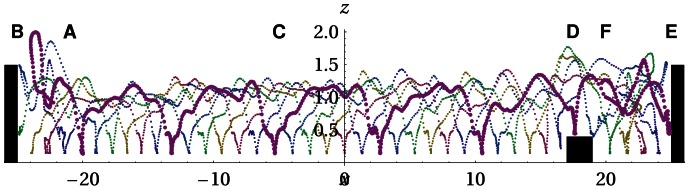
Plotted are the center positions of the 6 rigid segments in space for an interval of 40 sec. One line is highlighted for visibility. The trajectory starts while the robot is moving to the left (A) and is hitting the wall (B) (black box) and locomotes to the right (C) showing a very regular pattern. Then it overcomes an obstacle (D) and hits the wall (E) and moves back (F). The behavior is cyclic. Parameter:  .
.