
Figure 1.
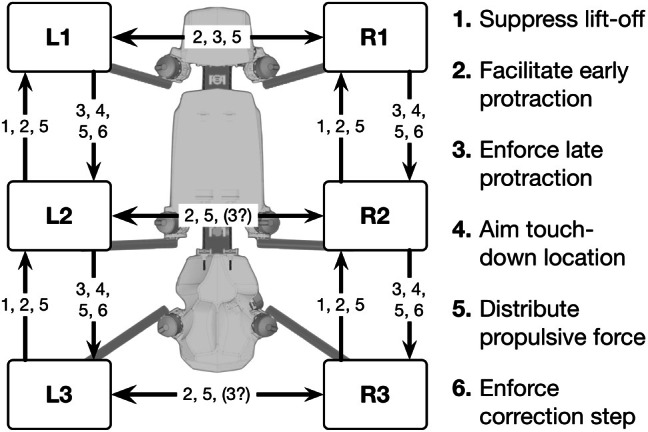
Schema showing the robot Hector and the morphological arrangement of the leg controllers and the coordination influences (1–6) between legs. Legs are marked by L for left legs and R for right legs and numbered from 1 to 3 for front, middle and hind legs, respectively.