
Figure 3.
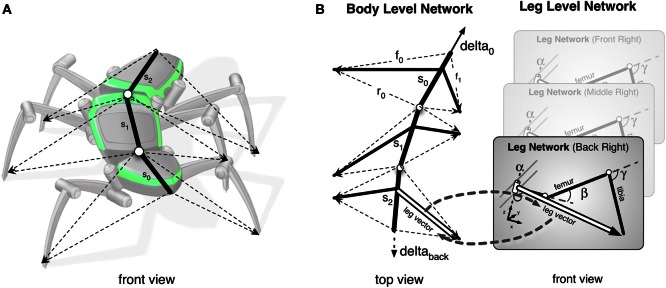
(A) Illustrates how the body model is attached to the body of robot Hector. (B) shows the abstracted body model. Vectors delta_0 and delta_back can pull the model in forward or backward direction, respectively. On the right, an example is shown how a leg network is connected to the abstracted/central body model.