
Figure 1.
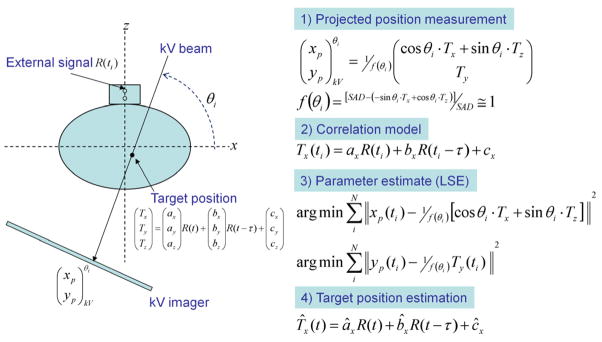
Schematic diagram showing the procedure of real-time target localisation. Each direction of internal target motion T(x, y, z;t), was estimated from the external respiratory signal R(t) through the correlation between R(ti) and the projected marker positions p(xp, yp;ti) on kV images by a state-augmented linear model: T(x, y, z;t)=aR(t − τ)+c. The model parameters were determined by solving a least-squares estimation (LSE) of the error Σ||p(xp, yp;ti) − P(θi)·(aR(ti) +bR(ti − τ)+c)||2 with projection operator P(θi) (Cho et al., 2010). Prior to treatment, rotational kV imaging of 120° was sequentially acquired to initialize the estimation model and start the estimation. The model parameters were updated every time a new kV image was acquired with the kV projection data covering 120-degree angular span. SAD = source-axis distance (100 cm in this study).