
Figure 1.
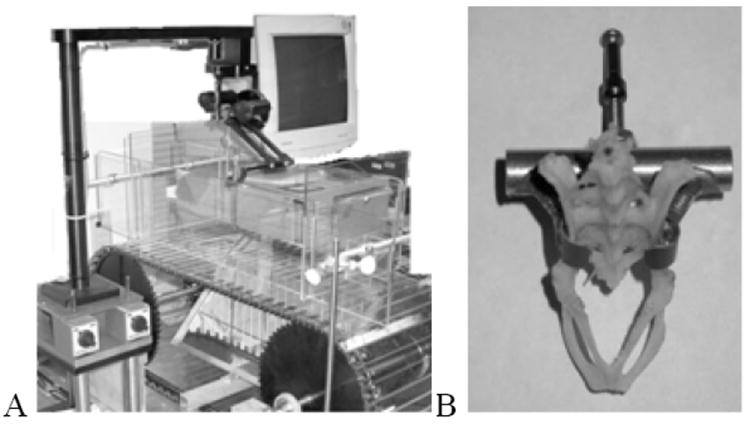
Robot training and stimulation driving framework. PHANTOM® Premium 1.0 device integrated with our treadmill. The robot arm connects to a control center, which is under the treadmill, and connects to a card interface to the ISA port of the PC. We can use a specific operating system for PHANTOM®, which is also developed by SensAble Technologies, to set the parameters of the robot arm. We can also collect feedback data from the robot arm by this OS. (b) The pelvic orthoses we used to connect the robot and the rat’s pelvis, demonstrated on a museum beetle cleaned pelvis.