
Fig. 2.
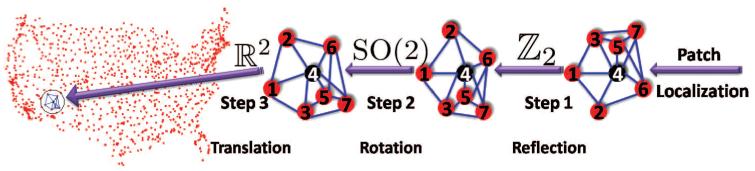
The ASAP recovery process for a patch in the U.S. cities graph. The rightmost subgraph is the embedding of the patch in its own local frame using a localization algorithm, such as stress minimization or SDP. To every patch, like the one shown here, there corresponds elements of Euc(2) that we try to estimate. Using the pair alignments, in Step 1 we estimate the reflection from an eigenvector synchronization computation over , in Step 2 we estimate the rotation angle by the same eigenvector synchronization method applied to SO(2), while in Step 3 we find the estimated coordinates by solving an overdetermined system of linear equations.