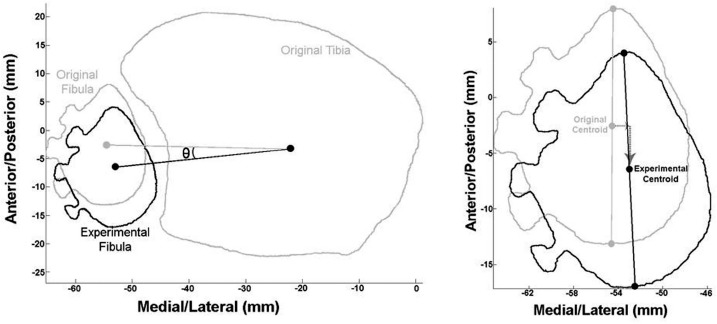
Figure 3. Objective measurements of fibular movement made by the algorithm in the 2D cutting plane. The rotation of the fibula (0 on the Left) around the tibia was calculated as the angle between vectors directed from the tibial centroid to the centroid of the fibula under different clamping conditions. the medial/lateral and anterior/posterior movement of the fibular centroid was calculated directly (Right), and the rotation of the fibula around its own axis was calculated by the angle between the lines connecting the anterior-most and posterior-most fibular points in the different clamping conditions.