
Figure 3.
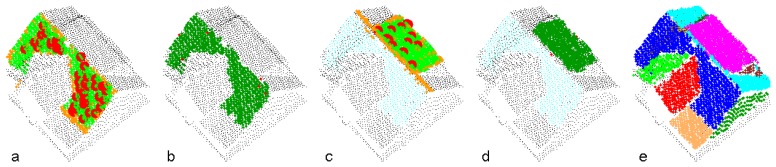
Detection of planar faces from a point cloud by segmentation. (a)-(d): Determination of the segments 1 and 2. (a) and (c): Seed cluster points (large red dots), points accepted in object space (orange), and points accepted in feature space (green). (b) and (d): Result of the robust plane fit (dark green: accepted; red: rejected). The small cyan dots in (c) and (d) represent points already assigned to segment 1. Black points have not been used so far. (e): Final segmentation including roof and wall faces.