
Figure 2.
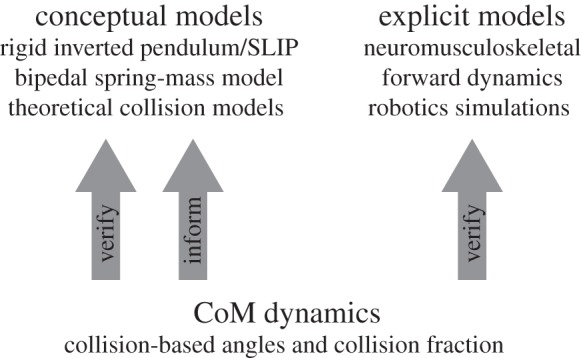
A schematic of collision-based CoM dynamics with respect to higher-level models of locomotion. Collision-based parameters of biological or robotic legged systems can verify conceptual and explicit models of locomotion. A collision-based perspective can also inform simplified mechanistic or conceptual models.