
Figure 3. A summary of the experimental conditions.
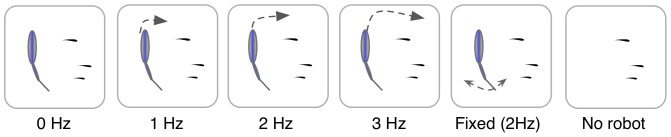
We considered tail-beat frequencies of  ,
,  ,
,  , and
, and  corresponding to swimming speeds of
corresponding to swimming speeds of  ,
,  ,
,  , and
, and  . To control for the tail-beating movement and the presence of the robot, we conducted tests with the robot anchored to preset locations in the tank and without the robot.
. To control for the tail-beating movement and the presence of the robot, we conducted tests with the robot anchored to preset locations in the tank and without the robot.