
Figure 5. Group coordination was always high.
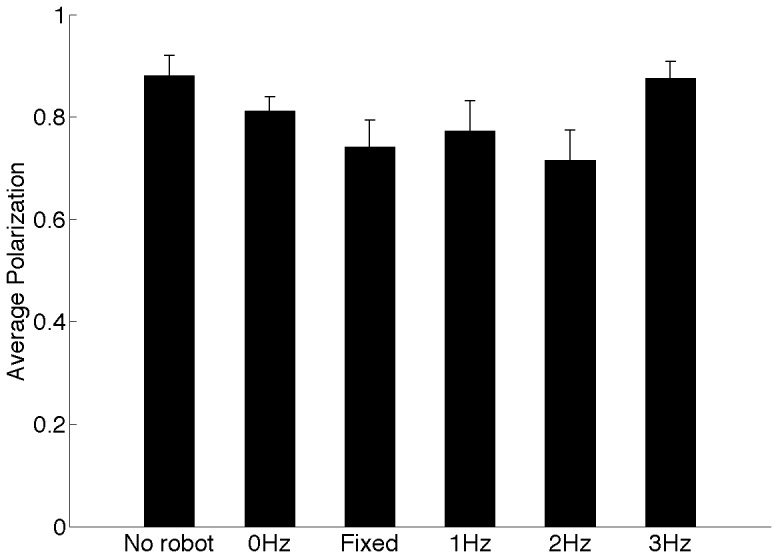
The polarization of zebrafish was not significantly different between conditions with the robot moving at varying speeds ( ,
,  ,
,  , and
, and  ). Control conditions (No robot and Fixed) are shown for reference. Error bars represent
). Control conditions (No robot and Fixed) are shown for reference. Error bars represent  standard error mean.
standard error mean.