
Figure 1. Experimental setup.
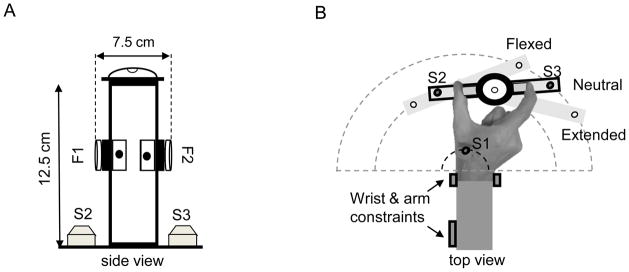
A: Side view of two digit precision grip device. F1 and F2 indicate the 3-D force/torque transducers. B: Top view of experimental setup. Subjects grasped the device in a flexed, neutral and extended wrist posture. Position orientation sensors S1 – S3 are located on the device and hand to measure wrist joint angle, and ensure the invariance of digit postures across wrist joint angles (see Methods for details).