
Figure 1.
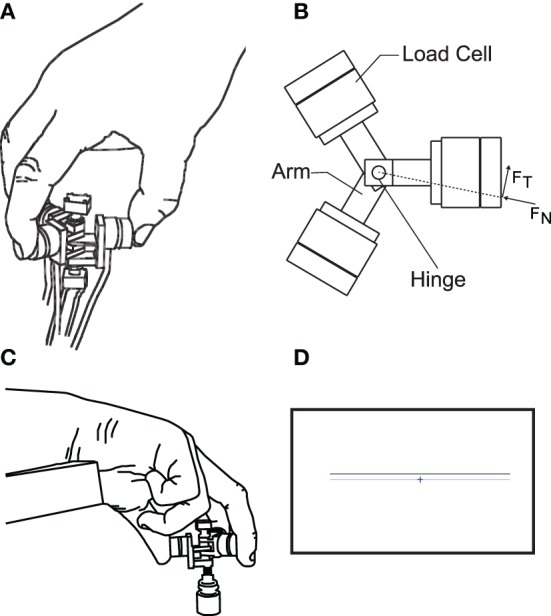
The apparatus for tripod grasp designed and built in our lab. It consists of three arms rotating about a common hinge to adjust to the most comfortable configuration for each subject. The arms are then fixed to create a rigid object. Each arm is instrumented with a 6-axis force transducer that forms the contact surfaces for tripod grasp. (A) Representative illustration of the instrumented device being held. (B) View from above onto the instrumented device, showing the three load cells mounted on arms that rotate about a common hinge, and the forces used in the analysis, computed from the load cell surface measured forces. (C) The holding posture during the trials, also showing a weight attached from below to the instrumented device. (D) Visual feedback presented to the subjects: a crosshair representing the instantaneous sum of normal forces, to be aligned with a target line.