
Fig. 1.
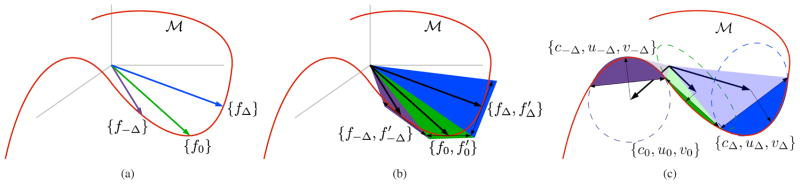
Illustration of the three approximations of the manifold of translates of the waveform,
 (a) The standard basis pursuit (BP) dictionary, FΔ, as used in Eq. (7), consists of discrete time-shifts of the waveform f(t). (b) Continuous basis pursuit with first-order Taylor interpolator (CBP-T), as specified by Eq. (13). Each pair of functions, (fiΔ,
), with properly constrained coefficients, represents a triangular region of the space (shaded regions). (c) Continuous basis pursuit with polar interpolation (CBP-P), as specified by Eq. (20). Each triplet of functions, (ciΔ, uiΔ, viΔ), represents a section of a cone (see Fig. 3(b) for parameterization).
(a) The standard basis pursuit (BP) dictionary, FΔ, as used in Eq. (7), consists of discrete time-shifts of the waveform f(t). (b) Continuous basis pursuit with first-order Taylor interpolator (CBP-T), as specified by Eq. (13). Each pair of functions, (fiΔ,
), with properly constrained coefficients, represents a triangular region of the space (shaded regions). (c) Continuous basis pursuit with polar interpolation (CBP-P), as specified by Eq. (20). Each triplet of functions, (ciΔ, uiΔ, viΔ), represents a section of a cone (see Fig. 3(b) for parameterization).