
Fig. 2.
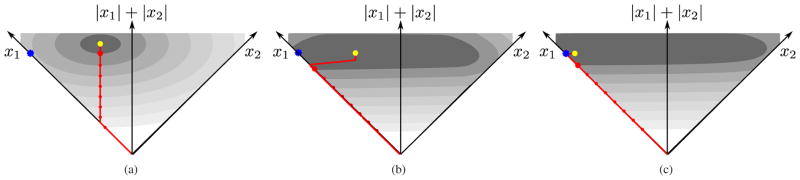
Geometry of convex objective functions for BP, CBP-T, and CBP-P methods, illustrated in two dimensions. Signal consists of a single waveform, f(t − 0.65Δ), and the dictionary contains two shifted copies of the waveform, {f(t), f(t − Δ)}, along with interpolating functions appropriate for each method. Each plot shows the space of coefficients, {x1, x2}, associated with the two shifted waveforms. Contours of gray-scale regions indicate level surfaces of reconstruction error (L2 norm term of the objective function). The blue star indicates the true L0-minimizing solution. The L1 sparsity measure is the sum of the two coefficient values, corresponding to the vertical position on the plot. Red curve indicates family of solutions traced out as λ is increased from 0 (yellow dot) to infinity. Red points along this path indicate equal increments in reconstruction accuracy, with enlarged point indicating a common value for comparison across all three methods. (a) Standard BP solution (Eq. (7)). (b) Continuous basis pursuit with Taylor interpolator (Eq. (13)), using a basis of {f0, , fΔ, }. In this case, the iso-accuracy contours are computed by minimizing the L2 error over all feasible values of the derivative coefficients, and are thus no longer elliptical. (c) CBP with polar interpolation (Eq. (20)).