
Fig. 4.1.
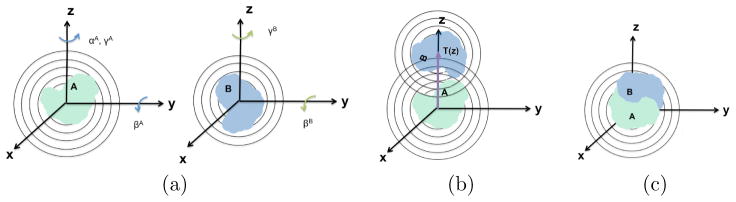
Schematic of the rigid-body correlation search scheme introduced in this work. Here A, B are two complex or real scalar-valued functions. In (a) the initial positions of A and B are given in different coordinate frames. Both functions are rotated. A is manipulated by a three-dimensional rotation, B only by a two dimensional rotation. In (b) A and B are translated to share the same origin. A set of a translation along the z-axis is searched until the best arrangement (c) is found.