
Figure 1. Brain-Machine Interface control architecture using actor-critic reinforcement learning.
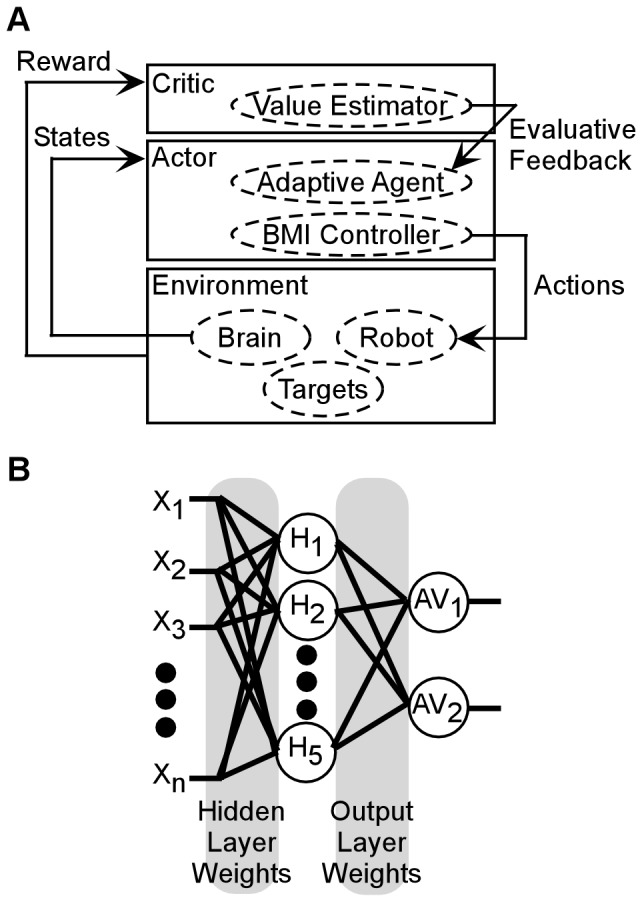
(A) The architecture’s defining characteristic is the interaction between the actor and critic modules. The actor interacts with the environment by selecting actions given input states (here the BMI Controller). The critic is responsible for producing reward feedback that reflects the actions’ impact on the environment, and which is used by the actor to improve its input to action mapping capability (here the Adaptive Agent). (B) The actor used here is a fully connected three layer feedforward neural network with five hidden (Hi) and two output (AVi) nodes. The actor input (X) was the normalized firing rates of each motor cortex neural signal. Each node was a processing element which calculated spiking probabilities using a tanh function, with the node emitting spikes for positive values.