
Figure 2. Two target robot reaching task using the RLBMI.
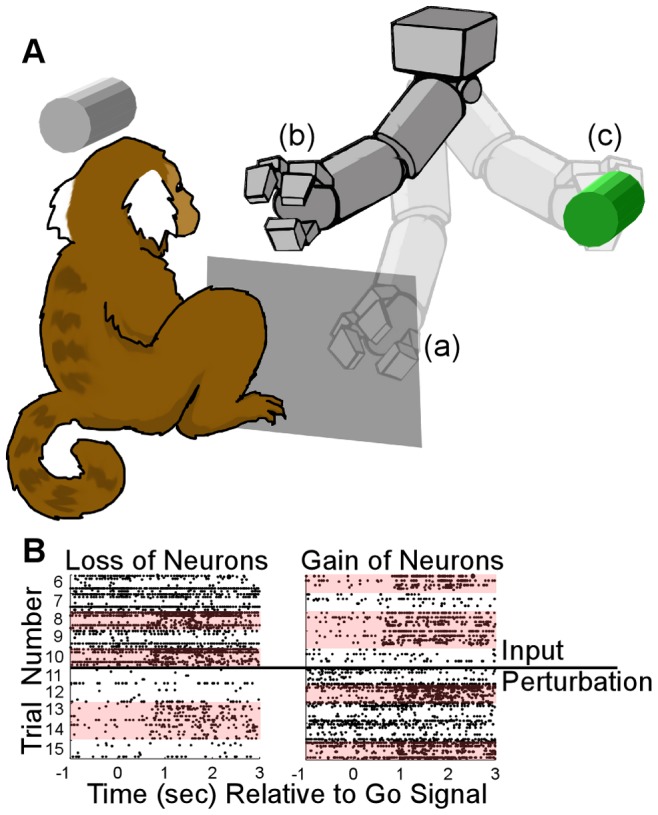
The monkeys initiated each trial by placing their hand on a touch sensor for a random hold period. A robot arm then moved out from behind an opaque screen (position a) and presented its gripper to the monkey (position b). A target LED on either monkey’s left (A trials) or right (B trials) was illuminated to indicate the goal reach location. The RLBMI system (Figure 1) used the monkeys’ motor cortex activity to either move the robot to the A or B target (panel A). The monkeys received food rewards only when the RLBMI moved the robot to the illuminated target (position c), Movie S1. Panel B shows examples of the spike rasters for all the neural signals used as inputs to the RLBMI during experiments which tested the effects of neural signals being lost or gained. Data is shown for trials 6–10 (which preceded the input perturbation) and trials 11–15 (which followed the input perturbation). For each trial, all the recorded neural signals are plotted as rows (thus there are multiple rows for a given trial), with data from type A trials being highlighted in red. Differences in firing patterns during the A and B trials are evident both before and after the perturbation, although the RLBMI still had to adapt to compensate for the considerable changes in the overall population activity that resulted from the input perturbations.