
Figure 7. The RLBMI consistently maintained performance across long time periods.
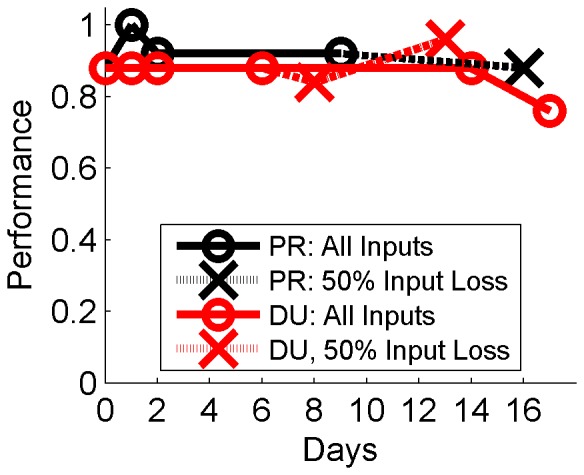
The RLBMI was applied in a contiguous fashion across closed loop experimental sessions spanning up to two weeks, and accurately controlled the robot across the sessions (performance defined as accuracy of robot movements during the first 25 trials of each session; O: solid lines). During the first session, the system was initialized with random parameters, and during each subsequent session the system was initialized using parameter weights it had learned previously. This approximates deploying the RLBMI across long time periods since it never has the opportunity to reset the weights and start over, but rather must maintain performance by working with a single continuous progression of parameter weight adaptations. Additionally, despite working with the same sequence of weights for multiple days, the RLBMI was still able to quickly adapt when necessary. A mechanical connector failure caused a loss of 50% of the inputs for PR between day 9 and 16 (X: black dashed line), but the RLBMI adapted quickly and only a small performance drop resulted. This input loss was simulated in two sessions with DU (X: red dashed line), and the system again adapted and maintained performance. Notably, the RLBMI performance during those perturbation sessions was similar or better than in two final DU tests in which no input loss was simulated (in the day 14 session the parameter weights were reset to those learned on day 6).