
Figure 3.
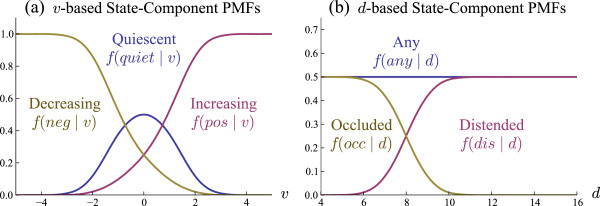
An example of the PMFs defined by (10)–(15). Given an observation of or d, the functions model the probability that the observation was generated from the state pertaining to each function. (a) shows examples of velocity-based component PMFs (10)–(12) with parameter σv = 1. (b) shows examples of diameter-based component PMFs (13)–(15) with parameters σd = 1, μd = 8, and mind = 0.