
Figure 1. Experimental conditions and kinematic parameters measured.
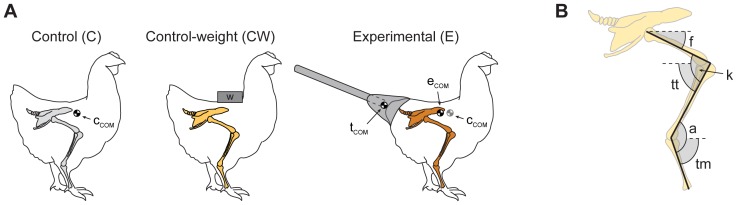
(A) Scheme of the control (C, grey hindlimbs), control-weight (CW, yellow hindlimbs), and experimental (E, orange hindlimbs) subjects. Control-weight subjects were raised with extra weight located over the pelvis. Experimental animals were raised carrying a wooden stick inserted in modeling clay and attached to the pelvic girdle. Estimations of the center of mass of the tail rig (tCOM), as well as of a control (cCOM) and of an experimental individual (eCOM), are shown. (B) Diagram of the segmental angles (f, femur; tt, tibio-tarsus; tm, tarso-metatarsus) and joint angles (k, knee; a, ankle) used in this study.