
Fig. 2.
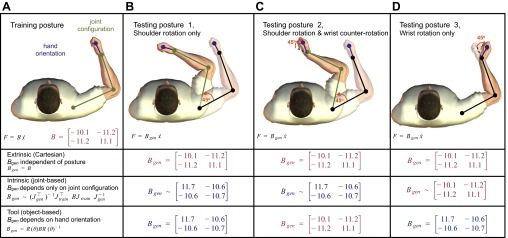
Schematic of the effect of the representation of dynamics on the pattern of generalization to novel postures. A: subjects learn to compensate for novel dynamics (external force field B) in a training posture defined by the joint configuration (shoulder and elbow angles) and the hand orientation. The generalization can then be tested at different limb postures in order to probe the coordinate frame in which the representation of the dynamics has been learned. Each of these 3 possibilities, extrinsic, intrinsic, and tool based, make different predictions depending on the posture. B: in testing posture 1, the arm has been rotated around the shoulder by 45°. While the predicted generalization of the force field (Bgen) for an extrinsic (Cartesian based) representation is unchanged, the predictions from both intrinsic and object-based representations are different (but identical to each other). This limb posture is equivalent to that examined in Shadmehr and Mussa-Ivaldi (1994). Note that it is not possible to distinguish object-based from intrinsic representations using only this posture. C: in testing posture 2, the wrist angle has been counterrotated by 45° (relative to testing posture 1) such that the hand orientation is identical to the training posture. Now the predictions based on extrinsic and object-based representations are identical but different from those based on an intrinsic representation. Note that θ in the rotation matrix corresponds to hand orientation in external space and not to wrist angle. D: finally, when only the hand orientation is changed by 45° (testing posture 3) from the training posture, the extrinsic and intrinsic predictions are identical and only the prediction from the object-based representation is different. For the intrinsic (joint based) predictions, the ∼ indicates that we model the arm here as a 2-joint system for illustrative purposes (although all modeling and analysis is performed with a 3-joint model; see materials and methods for details).