
Fig. 2.
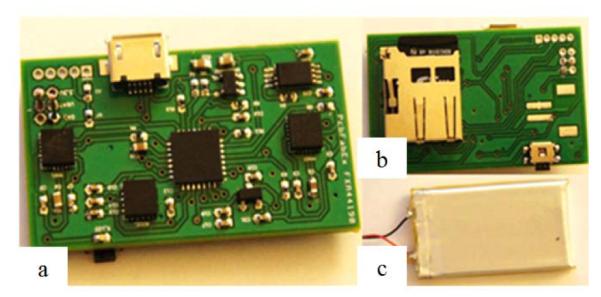
Sensing and data-logging board used to collect and store manumeter data. On the top side of the PC board (1a), magnetometers on either end of the board measure movement of the magnetic ring, and an accelerometer measures accelerations of the arm. A microcontroller reads incoming sensor signals and writes them to a microSD card located on the back of the printed circuit board (1b). A LiPO battery (1c) powers the unit for more than 20 hours and is recharged via a USB cable when attached to a computer.