
Fig. 3.
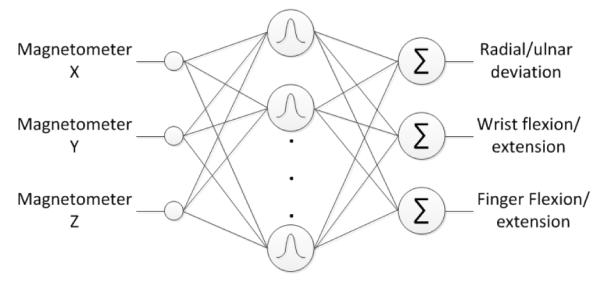
RBF network used to map magnetometer values to joint angles. The network takes the x, y, and z components of the magnetometer differential signal as inputs. These inputs are sent through a bank of 25 radial basis functions and then weighted and summed to produce estimates of radial/ulnar deviation, wrist flexion/extension, and finger flexion/extension as outputs.