
Fig. 3.
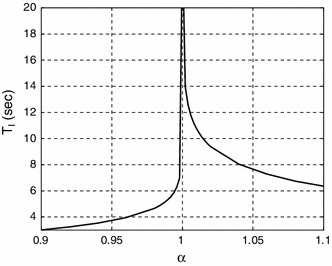
Limit cycle periods resulting from perturbing the open-loop trajectory controller (OLT) with parameter (25). corresponds to no perturbation, and the resultant homoclinic orbit has infinite period; small perturbations give long-period limit cycles