
Figure 2.
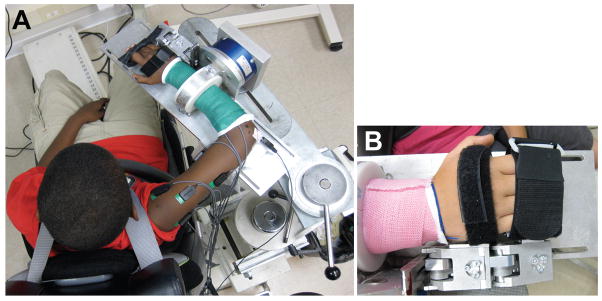
Experimental Setup. Subject was seated their arm placed in a fiberglass cast and connected rigidly to a 6 degree of freedom load cell (A). The arm was positioned such that the shoulder abduction angle was 85°, the shoulder horizontal adduction angle was 40°, and the elbow flexion angle was 90°. The subject’s hands and fingers were secured to a device to measure torques generated at the wrist and fingers (B). Placement of the finger and wrist sensors were made such that the center of rotation of the wrist was in line with the wrist sensor axis, and the center of rotation of the 2nd and 4th metacarpalphalangeal joints were in line with the axis of rotation of the finger sensor.