
Figure 3.
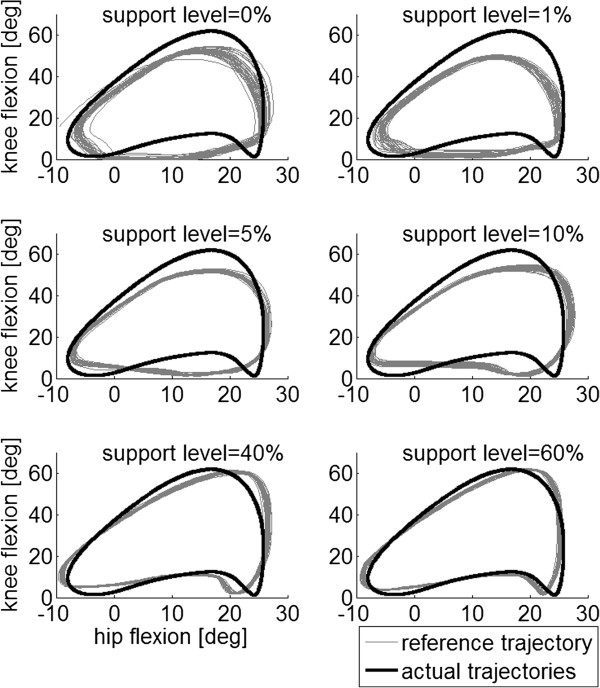
Typical example of hip and knee reference trajectories and actual joint trajectories for a healthy subject walking at 2 km/h using different impedance levels. Increasing the impedance levels results in a closer approximation of the reference trajectory and a reduction in the movement variability between steps. Here, the reference knee angle is enlarged by 10 percent to ensure that the robot provides support (since the healthy subject is expected to walk according to the healthy reference trajectory).