
Figure 10.
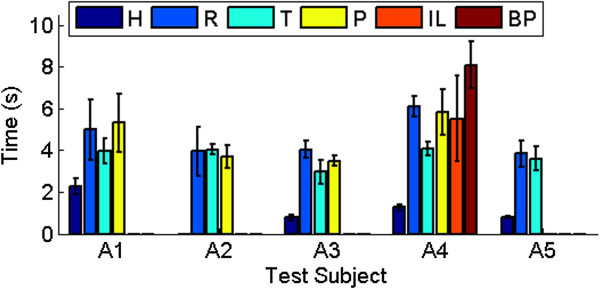
Limb absent subjects: time results. Task completion time results for individual limb absent subjects, using their own hand (H), the synergy controller with the Rhythmic (R) and Threshold (T) input mappings, and up to three of their own prostheses (P), as described in Figure 1 and Table 2. For test subject A4, this denotes the ETD Hook (Figure 1(j)). This subject also performed the unscrewing task with his i-Limb (IL) and body powered Grip Prehensor (BP).