
Figure 11.
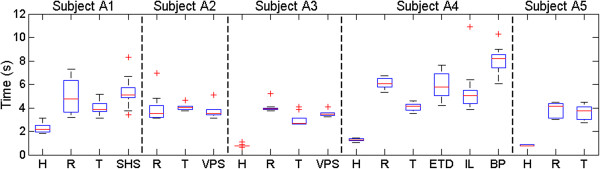
Limb absent test subjects: statistical analysis. Box and whisker plots of the limb absent participants’ time results for each method of control: human hand (H), synergy controller with the Rhythmic input mapping (R), and Threshold input mapping (T), and prosthesis(es). Refer to the caption of Figure 1 for abbreviations of the commercial prostheses tested by each subject. The human hand is significantly fastest in all applicable cases. The Shadow Hand Synergy Controller with the Threshold mapping method was the significantly fastest artificial method for subjects A1, A3, and A4. Subjects A2 and A5 showed no significant difference between the robotic systems they tested.