
Figure 2.
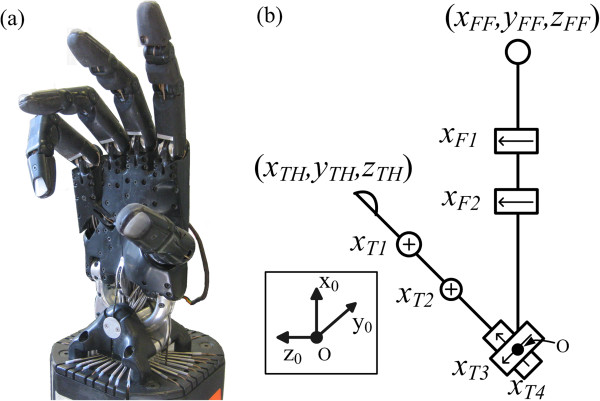
Hardware overview. (a) The C6M Shadow Hand has 24 joints and 20 DOFs. (b) The kinematic diagram and digit/joint naming convention of the first finger and thumb of the Shadow Hand. The origin is designated by O and the y0 axis is into the page. Axes of rotation are visualized as black arrows. Axes of rotation perpendicular to the page are designated by an (X).