
Figure 3.
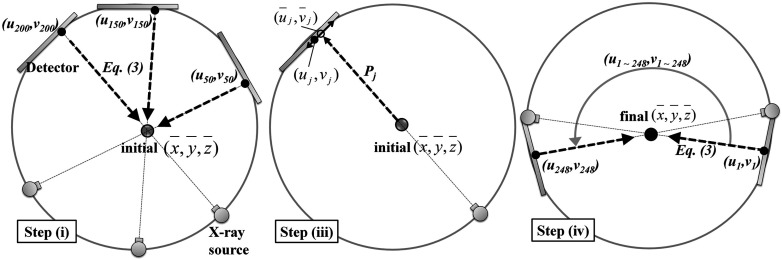
Markers were semiautomatically detected in 2D projection images. Based on a manually identified marker position in 3 to 5 projection images and Eq. 3, an initial estimate of () was acquired in Step (i). The initial () was forward-projected onto a projection image using a projection matrix. A radial search around the forward-projected point () shown as an open circle was conducted to locate (uj, vj) shown as a solid circle. Step (iv) updated () using the identified (uj, vj) from every projection and Eq. 3. The updated () provides a reference for the following motion correction methods.