
Fig. 1.
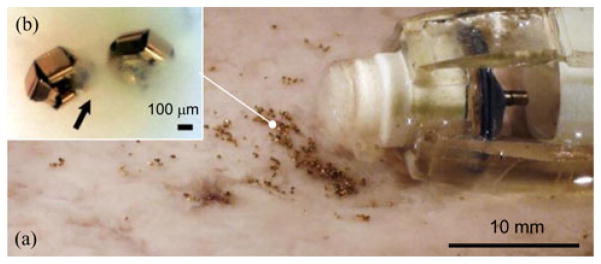
Biopsy using a hierarchical microrobot: (a) magnetically actuated capsule robot next to (b) the distributed self-folding μ-grippers. The developed magnetic capsule robot carries and releases untethered μ-grippers, and retrieves the tissue samples collected by μ-grippers. The arrow points out semitransparent tissue.