
Figure 2.
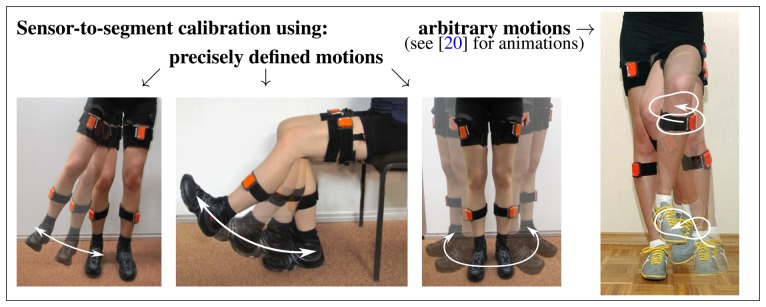
Examples for calibration motions that are used in the literature [14,15,17-19] to determine the coordinates of physiologically meaningful axes, e.g., the knee joint axis, in the local coordinate systems of the sensors. In such methods, the precision depends on how accurately the subject performs the motion. In contrast, the present approach uses arbitrary motions and identifies the sensor-to-segment mounting by exploiting kinematic constraints.