
Figure 5.
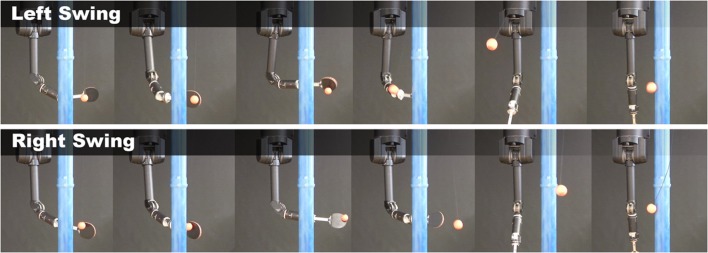
Time series of a successful swing of the robot. The robot first has to swing the ball to the pole and, subsequently, when the ball has swung backwards, can arc the ball around the pole. The movement is shown for a shoot to the left and to the right of the pole.