
Figure 9.
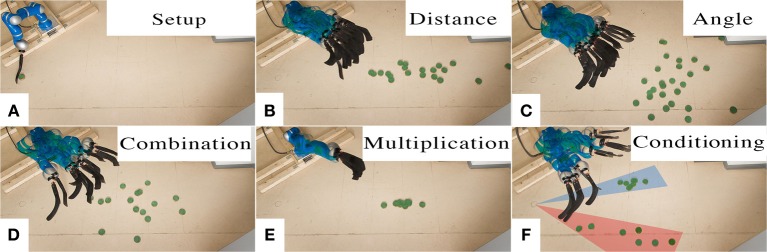
Robot Hockey. The robot shoots a hockey puck. The setup is shown in (A). We demonstrate ten straight shots for varying distances and ten shots for varying angles. The pictures show samples from the ProMP model for straight shots (B) and angled shots (C). Learning from combined data set yields a model that represents variance in both, distance and angle (D). Multiplying the individual models leads to a model that only reproduces shots where both models had probability mass, in the center at medium distance (E). The last picture shows the effect of conditioning on only left or right angles, the robot does not shoot in the center any more (F).