
Figure 1.
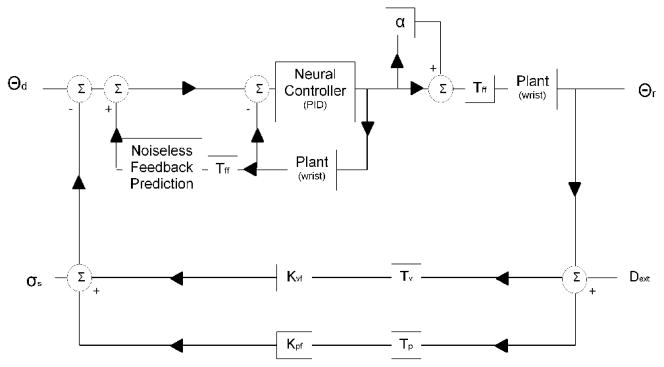
Control system model of sensorimotor control of movement. The inputs are the desired position of the wrist (Θd) and the perturbation (Dext) applied to either the visual or proprioceptive sensory feedback pathways. The system output is the physically realized wrist position (Θr)