
Table 2.
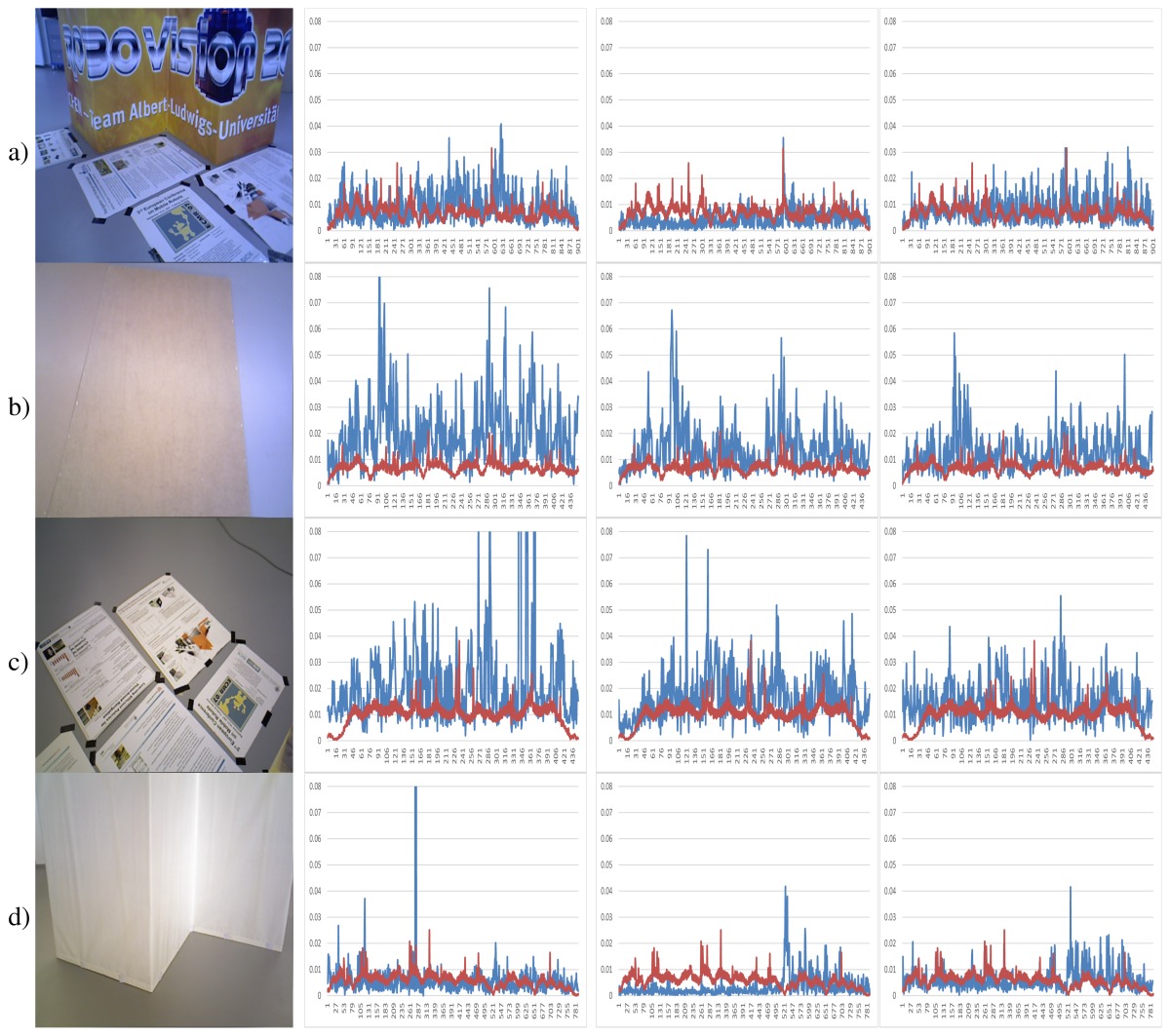
Relative pose translational errors in blue color (y-axis, meters) on the fr3 datasets (x-axis, frames) of the dense visual odometry, KinectFusion and visual features with ICP refinement methods. Red color values represent the ground-truth pose movement. Images belong to the dataset; (a) structure and texture. (b) no structure and no texture. (c) no structure and texture. (d) structure and no texture.
| Example Image | Dense Visual Odometry | KinectFusion | Visual Features + ICP |
|---|---|---|---|
| |||