
Figure 4.
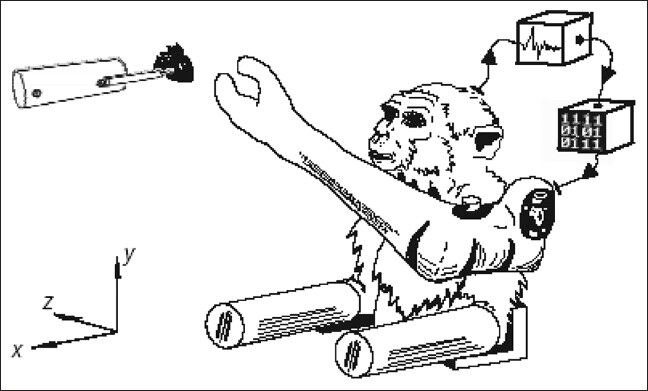
Embodied control setup: Each monkey had its arms restrained (inserted up to the elbow in horizontal tubes, shown at bottom of image) and a prosthetic arm positioned next to its shoulder. Spiking activity was processed (boxes at top right) and used to control the three-dimensional arm velocity and the gripper aperture velocity in real time. Food targets were presented (top left) at arbitrary positions. Reproduced from[56] with permission from nature publishing group