
Fig. 3.
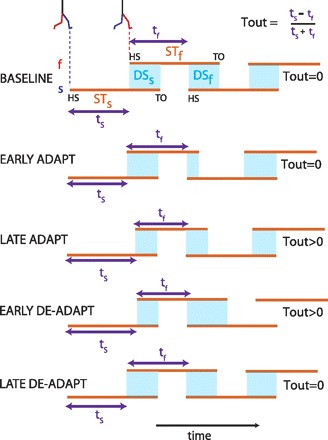
Schematic of temporal changes throughout adaptation. Stick figures show limb configuration at heel-strike for the fast (red) and slow (blue) limbs. Stance periods are shown by orange lines. Double support periods are represented by the shaded blue squares. Slow and fast step timings are shown by the purple arrows. Temporal motor output (Tout) is a normalized difference of step timings. When belts are tied during baseline walking, a temporal motor output of zero (equal purple arrows) and equal double support periods (blue regions) are apparent. In early adaptation (split belt) the temporal motor output is still zero, but double support periods (blue regions) are asymmetric. To equalize the double support periods, the slow and fast step timings are changed so that the temporal motor output is greater than zero (i.e., ts is larger than tf, Late Adaptation). In deadaptation, the belts are tied (i.e., move at the same speed), so the stance periods (orange lines) return back to baseline values. However, the nervous system has learned a new motor output (i.e., slow and fast step timings), which results in unequal double support periods, but the double support asymmetry is in the opposite direction (DSf > DSs). By the end of deadaptation, the nervous system changes the temporal motor output back to zero, and walking looks similar to baseline.