
Figure 1.
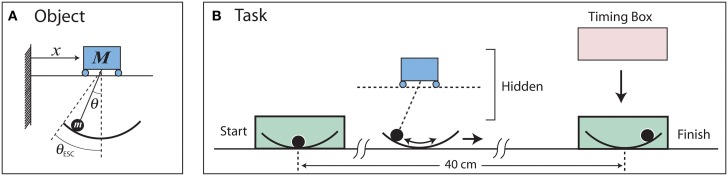
(A) Model of the cart and pendulum system with variables and parameters. (B) Task implementation. The visual display showed the pendulum bob and an arc drawn for the cup; the cart and pendulum were not shown. The cart and pendulum were haptically rendered with a robotic manipulandum. Subjects applied forces to the manipulandum, which in turn accelerated the cart (cup) and pendulum bob (ball).