
Fig. 7.
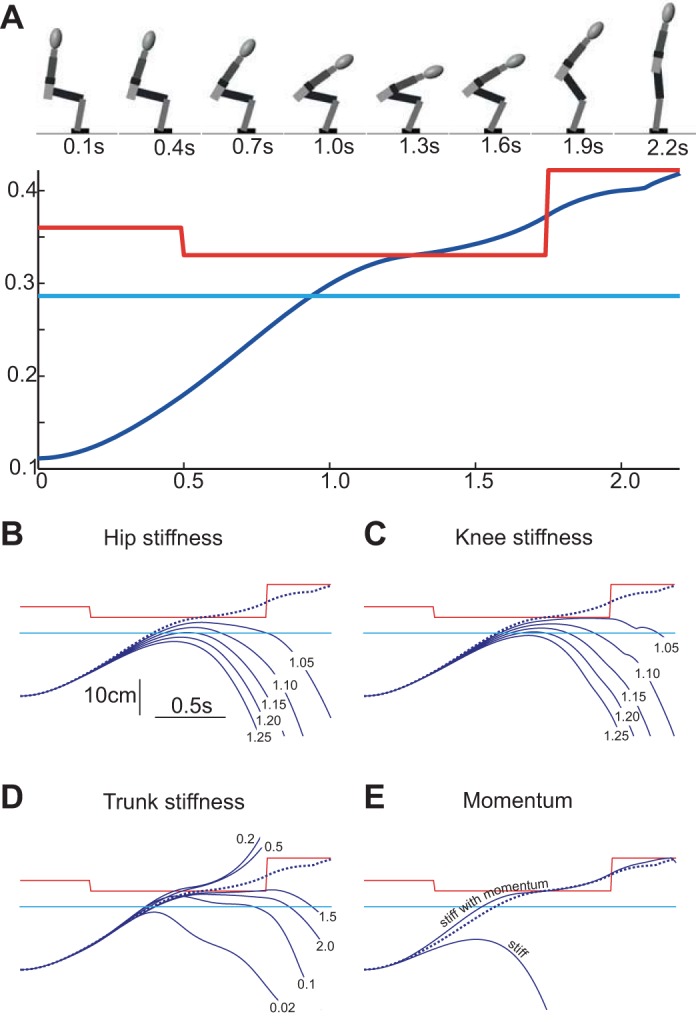
Effect of stiffness on model CoM trajectory. A: successful chair-rise simulation. The figurine shows the model geometry at 0.3-s intervals. The CoM (blue trace) moved anteriorly, crossing the heel (cyan trace) and under-foot CoP (red trace). This forward motion was driven by gravity acting to incline the upper body, which also flexed the hip, knee and ankle (the latter two joints flexed from the forward translation of the femur as the pelvis tilted). Active hip and knee extensor torques weighted the feet and extended the legs. Active ankle torque moved the CoP backwards then forwards to approximate that measured experimentally. Note that CoM motion was not due to active hip flexion. Active hip flexor torque was not observed experimentally for 2- to 8-s durations, so it was not included in the model. B: the effect of hip stiffness on CoM motion. Dashed line shows the CoM trajectory for the “default” simulation in A. Solid blue lines show the result of simulations where hip stiffness was increased by a factor of 1.05–1.25. All increases caused “sit-back” failures as the CoM failed to reach the CoP. Note that, because the hip stiffness was activity dependent, the restriction is analogous to difficulty stretching active hip extensors. C: the effect of increased knee stiffness (1.05–1.25× default) on CoM trajectory. Knee stiffness restricted forward body motion by reducing thigh, shank and pelvis motion. As in the previous panel, this restriction represents difficulty driving eccentric contractions of the legs during weight shift. D: the effect of trunk stiffness on CoM motion. The passive stiffness of all trunk joints was scaled by between 0.02 and 2× the default value. Both high and low trunk stiffness acted to hinder CoM motion. This complex dependency likely resulted from altered force transmission and trunk kinematics. E: the effect of momentum on stiff model behavior. A “stiff” model was created by increasing hip (activity-dependent stiffness 1.5× default), knee (activity-dependent stiffness 1.25× default) and trunk stiffness (passive value 2× default). This caused a prominent sit-back failure as the CoM failed to reach the CoP. By delaying weight shift (i.e., activating hip and knee torques 0.09 and 0.13 s later, respectively), the same stiff model could be made to successfully rise. The delay increased forward trunk momentum, which overcame the higher leg stiffness during weight shift and caused the CoM to reach the CoP. As the minimal delays that enabled forward balance were used, the “stiff with momentum” trace represents the lower bound for weight-shift delay and VCoM (slope) for the stiff model to successfully stand. Note that the disparity between stiff and default model joint stiffness (e.g., 1.5×) underestimated that measured between HU and AT (Cacciatore et al. 2011a).