
Fig. 1.
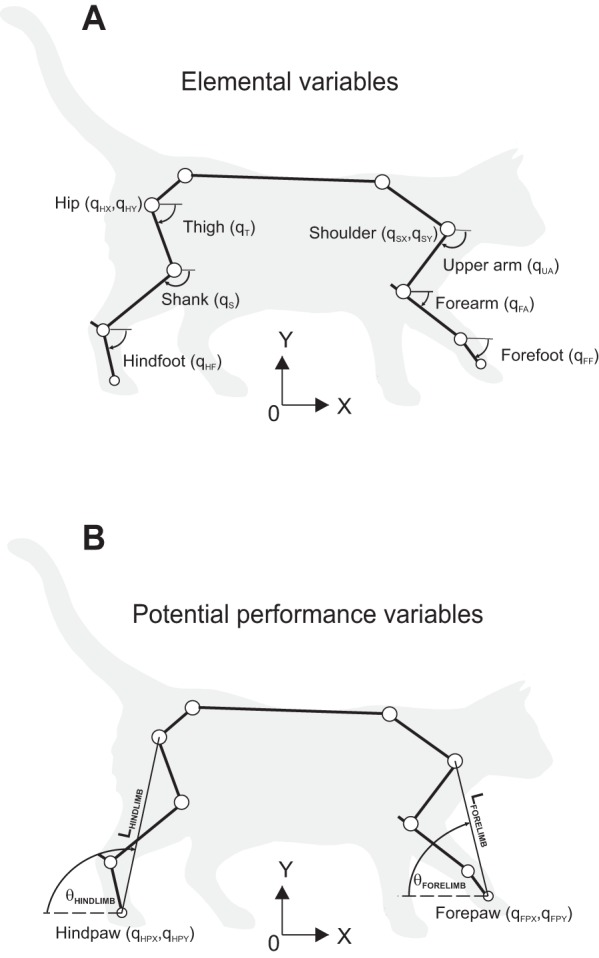
Kinematic model of fore- and hindlimbs used for uncontrolled manifold (UCM) analysis. A: kinematics of each limb is described by 5 generalized coordinates (elemental variables): Cartesian x- and y-coordinates of suspension point [hip (H) or shoulder (S)] and 3 segment angles with the horizon [thigh (T) or upper arm (UA), shank (S) or forearm (FA), hindfoot (HF) or forefoot (FF)] (hindfoot comprises tarsals and hind digits, forefoot consists of carpals and fore digits). B: potential performance variables for UCM analysis are the two-dimensional (2D) position of the limb endpoint, i.e., Cartesian x- and y-coordinates of forepaw (FP) or hindpaw (HP), vertical or horizontal position of the paw, limb length (L) and limb orientation (θ). The open circles indicate positions of reflective markers for motion capture.