
Fig. 3.
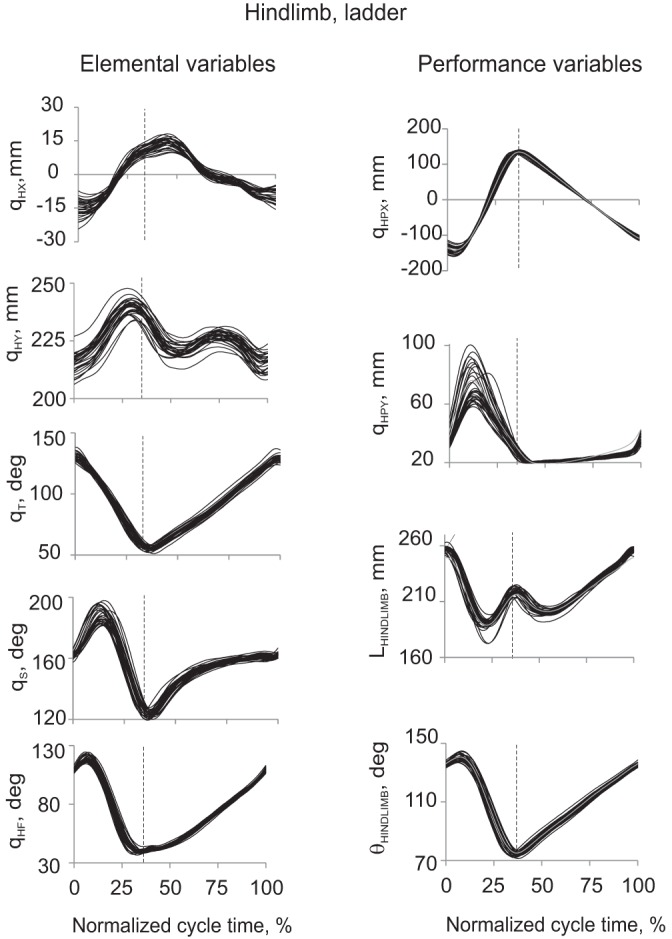
Examples of hindlimb elemental (left) and potential performance variables (right) during 30 cycles of ladder walking from a representative cat BL. Each individual cycle is represented by a thin black line. Vertical dashed line in each panel separates the swing and stance phase. Left (from top to bottom): Cartesian horizontal qHX (after detrending, see text) and vertical qHY coordinates of the hip, orientation angles of the thigh qT, shank qS and hindfoot qHF (for definition of the elemental variables, see Fig. 1). Right (from top to bottom): Cartesian horizontal qHPX (after detrending) and vertical qHPY coordinates of the hindpaw, hindlimb length LHINDLIMB and hindlimb orientation θHINDLIMB (for definition of the potential performance variables, see Fig. 1). The gray line in each panel represents the mean of the linearized forward kinematics solutions computed for 30 walking cycles (see Eq. 3).