
Figure 1. Experimental set up.
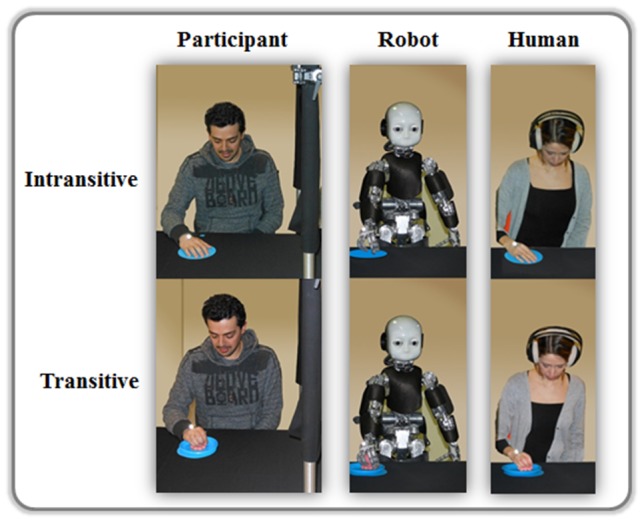
Participant – on the left side of the black curtain – observed intransitive (upper row) and transitive (lower row) movements performed by the humanoid robot (left column) and by the human demonstrator (right column) –on the right side of the black curtain. In the intransitive condition the model and the participant simply moved the hand from the start to the end position indicated by a blue square and a blue circles, respectively. In the transitive movements the model and the participant moved a pink octopus from the blue square into a final blue toy fishpond. The distance between the start and the final positions was constant.